Lab 4: Preemptive Multitasking¶
Handed out: Tuesday, March 3, 2020
Due: Monday, April 13, 2020
Introduction¶
In this assignment, you will enable user-level applications by implementing processes and related infrastructure. You will write privilege level switching code, context-switching code, a simple round-robin scheduler, system call handlers, and a virtual memory subsystem. You will also write several user programs and load them to start new processes.
Phase 0: Getting Started¶
Fetch the update for lab 4 from our git repository to your development machine.
$ git fetch skeleton
$ git merge skeleton/lab4
This is the directory structure of our repository. The directories you will be working on this assignment are marked with *.
.
├── bin : common binaries/utilities
├── doc : reference documents
├── ext : external files (e.g., resources for testing)
├── tut : tutorial/practices
│ ├── 0-rustlings
│ ├── 1-blinky
│ ├── 2-shell
│ ├── 3-fs
│ └── 4-spawn : questions for lab4 *
├── boot : bootloader
├── kern : the main os kernel *
├── lib : required libraries
│ ├── aarch *
│ ├── kernel_api *
│ ├── fat32
│ ├── pi
│ ├── shim
│ ├── stack-vec
│ ├── ttywrite
│ ├── volatile
│ └── xmodem
└── user : user level program *
├── fib *
└── sleep *
You may need to resolve conflicts before continuing. For example, if you see a message that looks like:
Auto-merging kern/src/main.rs
CONFLICT (content): Merge conflict in kern/src/main.rs
Automatic merge failed; fix conflicts and then commit the result.
You will need to manually modify the main.rs file to resolve
the conflict. Ensure you keep all of your changes from lab 3.
Once all conflicts are resolved, add the resolved files with
git add and commit. For more information on resolving merge
conflicts, see this tutorial on
githowto.com.
ARM Documentation¶
Throughout this assignment, we will be referring to three official ARM documents. They are:
-
This is the official reference manual for the ARMv8 architecture. This is a wholistic manual covering the entire architecture in a general manner. For the specific implementation of the architecture for the Raspberry Pi 3, see the ARM Cortex-A53 Manual. We will be referring to sections from this manual with notes of the form (ref: C5.2) which indicates that you should refer to section C5.2 of the ARMv8 Reference Manual.
-
Manual for the specific implementation of the ARMv8 (v8.0-A) architecture as used by the Raspberry Pi 3. We will be referring to sections from this manual with notes of the form (A53: 4.3.30) which indicates that you should refer to section 4.3.30 of the ARM Cortex-A53 Manual.
-
A high-level guide on how to program an ARMv8-A process. We will be referring to sections from this manual with notes of the form (guide: 10.1) which indicates that you should refer to section 10.1 of the ARMv8-A Programmer Guide.
You can find all those three documents under doc/ subdirectory of our lab repo.
We recommend that you download these three documents now and
maintain them within easy reach.
Phase 1: ARM and a Leg¶
In this phase, you will learn about the ARMv8 architecture, switch to a lower privilege level, install exception vectors, enable timer interrupts, and handle breakpoint exceptions by starting a debug shell. You will learn about exception levels in the ARM architecture and how the architecture handles exceptions, interrupts, and privilege levels.
Subphase A: ARMv8 Overview¶
In this subphase, you will learn about the ARMv8 architecture. You will not be writing any code, but you will be answering several questions about the architecture.
The ARM (Acorn RISC Machine) CPU architecture has a history spanning over 30 years. There are eight major revisions, the latest being ARMv8-A, introduced in 2011. The Broadcom BCM2837 SOC contains an ARM Cortex-A53, an ARMv8.0-A based CPU. The Cortex-A53 (and other specific CPUs) are referred to as implementations of the architecture. This is the CPU you have been programming in the last three assignments.
ARM CPUs dominate the mobile market.
ARM CPUs dominate the mobile market, appearing in over 95% of all smartphones sold worldwide and almost 100% of all flagship smartphones including Apple’s iPhone and Google’s Pixel.
Thus far, we’ve avoided the details of the underlying architecture, allowing the Rust compiler to handle them for us. To enable running processes in user-space, however, we’ll need to program the CPU directly at the lowest of levels. Programming the CPU directly requires familiarization with the CPUs native assembly language and overall concepts. We’ll start with an overview of the architecture and then proceed to describe a few key assembly instructions.
Registers¶
The ARMv8 architecture includes the following registers (ref: B1.2.1):
r0…r30- 64-bit general purpose registersThese registers are accessed via aliases. The registers
x0…x30alias all 64-bits of these registers. The registersw0…w30alias the least-significant 32-bits of these registers.
lr- 64-bit link register; aliasesx30Used to store the link address. The
bl <addr>instruction stores the address of the next instruction inlrand branches toaddr. Theretinstruction sets the PC to the address inlr.
sp- a dedicated stack pointerThe lower 32 bits of the stack-pointer can be accessed via
wsp. The stack pointer must always be 16-byte aligned.
pc- the program counterThis register can be read but not written. The
pcis updated on branching instructions and exception entry/return.
v0…v31- 128-bit SIMD and FP point registersThese registers are used for vectorizing SIMD instruction and floating point operations. These registers are accessed via aliases. The registers
q0…q31alias all 128-bits of these registers. The registersd0…d31alias the lower 64-bits of these registers. There are also alias for the lower 32, 16, and 8 bits of these registers prefixed withs,h, andb, respectively.
xzr- read-only zero registerThis pseudo-register, which may or may not be a hardware register, always holds the value
0.
There are also many special-purpose registers. We’ll describe these as needed, as in the next section.
PSTATE¶
At any point in time, an ARMv8 CPU captures the program state in a pseudo-register named PSTATE (ref: D1.7). PSTATE isn’t a real register; there’s no way to read or write it directly. Instead, there are special purpose registers that can be used to read or write the various fields of the PSTATE pseudo-register. On ARMv8.0, these are:
NZCV- condition flags
DAIF- exception mask bits, used to prevent exceptions from being issued
CurrentEL- the current exception level (explained later)
SPSel- stack pointer selector
These registers belong to the class of registers known as system
registers or special registers
(ref:
C5.2). Typically, registers can be loaded into from memory
(written) using the ldr instruction and stored in memory
(read) using the str instruction. System registers cannot be
read/written with these instructions. Instead, the special purpose
instructions mrs and msr must be used
(ref:
C6.2.162 - C6.2.164). For example to read NZCV into x1,
you can issue the instruction:
mrs x1, NZCV
Execution State¶
At any point in time, an ARMv8 CPU is executing in a given execution state. There are two such execution states: AArch32, corresponding to 32-bit ARMv7 compatibility mode, and AArch64, 64-bit ARMv8 mode (guide: 3.1). We’ll always be executing in AArch64.
Secure Mode¶
At any point in time, an ARMv8 CPU is executing in a given security state, otherwise known as a security mode or security world. There are two security states: secure, and non-secure, also known as normal. We’ll always be executing in non-secure (normal) mode.
Exception Levels¶
At any point in time, an ARMv8 CPU is executing at a given exception level (guide: 3). Each exception level corresponds to a privilege level: the higher the exception level, the greater the privileges programs running at that level have. There are 4 exception levels:
EL0 (user) - Typically used to run untrusted user applications.
EL1 (kernel) - Typically used to run privileged operating system kernels.
EL2 (hypervisor) - Typically used to run virtual machine hypervisors.
EL3 (monitor) - Typically used to run low-level firmware.
The Raspberry Pi’s CPU boots into EL3. At that point, the firmware
provided by the Raspberry Pi foundation runs, switches to EL2, and
runs our kernel8.img file. Thus, our kernel starts executing
in EL2. Later, you’ll switch from EL2 to EL1 so that our kernel is
running in the appropriate exception level.
ELx Registers¶
Several system registers such as ELR, SPSR, and SP are
duplicated for each exception level. The register names are
suffixed with _ELn to indicate the register for exception
level n. For instance, ELR_EL1 is the exception link
register for EL1, while ELR_EL2 is the exception link
register for EL2.
We use the suffix x, such as in ELR_ELx, when we refer to
a register from the target exception level x. The target
exception level is the exception level the CPU will switch to, if
necessary, to run the exception vector. We use the suffix s,
such as in SP_ELs, when we refer to a register in the source
exception level s. The source exception level is the
exception level in which the CPU was executing when the exception
occurred.
Switching Exception Levels¶
There is exactly one mechanism to increase the exception level and exactly one mechanism to decrease the exception level.
To switch from a higher level to a lower level (a privilege
decrease), the running program must return from the exception
level using the eret instruction
(ref:
D1.11). On executing an eret instruction when the current
exception level is ELx, the CPU:
Sets the PC to the value in
ELR_ELx, a special purpose system-register.Sets the PSTATE to the values in
SPSR_ELx, a special purpose system-register.
The SPSR_ELx register
(ref:
C5.2.18) also contains the exception level to return to. Note that
changing exception levels also has the following implications:
On return to
ELs, thespis set toSP_ELsifSPSR_ELx[0] == 1orSP_EL0ifSPSR_ELx[0] == 0.
Switching from a lower level to a higher level only occurs as a
result of an exception
(guide:
10). Unless otherwise configured, the CPU will trap exceptions to
the next exception level. For instance, if an interrupt is
received while running in EL0, the CPU will switch to EL1 to
handle the exception. When a switch to ELx occurs, the CPU
will:
Mask all exceptions and interrupts by setting
PSTATE.DAIF = 0b1111.Save
PSTATEand other fields toSPSR_ELx.Save the preferred exception link address to
ELR_ELx(ref: D1.10.1).Set
sptoSP_ELxifSPSelwas set to1.Save the exception syndrome (described later) to
ESR_ELx(ref: D1.10.4).Set
pcto address corresponding to the exception vector (described later).
Note that the exception syndrome register is only valid when the exception was synchronous (described next). All general purpose and SIMD/FP registers will maintain the value they had when the exception occurred.
Exception Vectors¶
When an exception occurs, the CPU jumps to the exception vector for that exception (ref: D1.10.2). There are 4 types of exceptions each with 4 possible exception sources for a total of 16 exception vectors. The four types of exceptions are:
Synchronous - an exception resulting from an instruction like
svcorbrkIRQ - an asynchronous interrupt request from an external source
FIQ - an asynchronous fast interrupt request from an external source
SError - a “system error” interrupt
The four sources are:
Same exception level when source
SP = SP_EL0Same exception level when source
SP = SP_ELxLower exception level running on AArch64
Lower exception level running on AArch32
As described in (guide: 10.4):
When an exception occurs, the processor must execute handler code which corresponds to the exception. The location in memory where [an exception] handler is stored is called the exception vector. In the ARM architecture, exception vectors are stored in a table, called the exception vector table. Each exception level has its own vector table, that is, there is one for each of EL3, EL2 and EL1. The table contains instructions to be executed, rather than a set of addresses [as in x86]. Each entry in the vector table is 16 instructions long. Vectors for individual exceptions are located at fixed offsets from the beginning of the table. The virtual address of each table base is set by the [special-purpose] Vector Based Address Registers
VBAR_EL3,VBAR_EL2andVBAR_EL1.
The vectors are physically laid out as follows:
Target and source at same exception level with source
SP = SP_EL0:VBAR_ELxOffsetException
0x000
Synchronous exception
0x080
IRQ
0x100
FIQ
0x180
SError
Target and source at same exception level with source
SP = SP_ELx:VBAR_ELxOffsetException
0x200
Synchronous exception
0x280
IRQ
0x300
FIQ
0x380
SError
Source is at lower exception level running on AArch64
VBAR_ELxOffsetException
0x400
Synchronous exception
0x480
IRQ
0x500
FIQ
0x580
SError
Source is at lower exception level running on AArch32
VBAR_ELxOffsetException
0x600
Synchronous exception
0x680
IRQ
0x700
FIQ
0x780
SError
The vector table is contiguous.
Interface with Rust¶
We’ve provided aarch64 library (lib/aarch64) to provide Rusty interface
in order to access low-level details about the system.
Before moving to next subphase, please compare your understanding with registers defined in
regs.rs. The other files in the library will be revisited at the
end of the next subphase.
Recap¶
For now, this is all of the ARMv8 architecture that you need to know. Before continuing, answer the following questions:
Which registers alias x30? (arm-x30)
If a value of 0xFFFF is written to x30, which two
other registers names can be used to retrieve that value?
How would you set the PC to a specific address? (arm-pc)
How would you set the PC to the address A using the
ret instruction? How would you set the PC to the address
A using the eret instruction? Be specific about
which registers you would set to which values.
How would you determine the current exception level? (arm-el)
Which instructions, exactly, would you run to determine the current exception level?
How would you change the stack pointer on exception return? (arm-sp-el)
The stack pointer of a running program is A when an
exception occurs. After handling the exception, you’d like
to return back to where the program was executing but want
to change its stack pointer to B. How would you do so?
Which vector is used for system calls from a lower EL? (arm-svc)
A process is running in EL0 when it issues an svc
instruction. To which address, exactly, does the CPU jump
to?
Which vector is used for interrupts from a lower EL? (arm-int)
A process is running in EL0 when a timer interrupt
occurs. To which address, exactly, does the CPU jump to?
How do you unmask IRQ exceptions? (arm-mask)
Which values would you write to which register to unmask IRQ interrupts only?
How would you eret into an AArch32 execution state? (arm-aarch32)
An exception has occurred with the source running in the
AArch64 state. The target is also running in AArch64. Which
values in which registers would you change so that on return
from the exception via eret, the CPU switches to the
AArch32 execution state?
Hint
See (guide: 10.1).
Subphase B: Instructions¶
In this subphase, you will learn about the ARMv8 instruction set. You will not be writing any code, but you will be answering several questions about the instruction set.
Accessing Memory¶
ARMv8 is a load/store RISC (reduced instruction set computer) instruction set. Perhaps the defining feature of such an instruction set is that memory can only be accessed through specific instructions. In particular, memory can only be read by reading into a register with a load instruction and written to memory by storing from a register using a store instruction.
There are many load and store instructions and variations of particular instructions. We’ll start with the simplest:
ldr <ra>, [<rb>]: load value from address in<rb>into<ra>str <ra>, [<rb>]: store value in<ra>to address in<rb>
The register <rb> is known as the base register. Thus, if
r3 = 0x1234, then:
ldr r0, [r3] // r0 = *r3 (i.e., r0 = *(0x1234))
str r0, [r3] // *r3 = r0 (i.e., *(0x1234) = r0)
You can also provide an offset in the range [-256, 255]:
ldr r0, [r3, #64] // r0 = *(r3 + 64)
str r0, [r3, #-12] // *(r3 - 12) = r0
You can also provide a post-index that changes the value in the base register after the load or store has been applied:
ldr r0, [r3], #30 // r0 = *r3; r3 += 30
str r0, [r3], #-12 // *r3 = r0; r3 -= 12
You can also provide a pre-index that changes the value in the base register before the load or store has been applied:
ldr r0, [r3, #30]! // r3 += 30; r0 = *r3
str r0, [r3, #-12]! // r3 -= 12; *r3 = r0
Offset, post-index, and pre-index are known as addressing modes.
Finally, you can load and store from two registers at once using
the ldp and stp (load pair, store pair) instructions.
These instructions can be used with all of the same addressing
modes as ldr and str:
// push `x0` and `x1` onto the stack. after this operation the stack is:
//
// |------| <x (original SP)
// | x1 |
// |------|
// | x0 |
// |------| <- SP
//
stp x0, x1, [SP, #-16]!
// pop `x0` and `x1` from the stack. after this operation, the stack is:
//
// |------| <- SP
// | x1 |
// |------|
// | x0 |
// |------| <x (original SP)
//
ldp x0, x1, [SP], #16
// these four operations perform the same thing as the previous two
sub SP, SP, #16
stp x0, x1, [SP]
ldp x0, x1, [SP]
add SP, SP, #16
// same as before, but we are saving and restoring all of x0, x1, x2, and x3.
sub SP, SP, #32
stp x0, x1, [SP]
stp x2, x3, [SP, #16]
ldp x0, x1, [SP]
ldp x2, x3, [SP, #16]
add SP, SP, #32
Loading Immediates¶
An immediate is another name for an integer whose value is known
without any computation. To load a 16-bit immediate into a
register, optionally shifted to the left by a multiple of 16-bits,
use mov (move). To load a 16-bit immediate shifted by left
some number of bits without replacing any of the other bits, use
the movk (move/keep) instruction. An example of their usage:
mov x0, #0xABCD, LSL #32 // x0 = 0xABCD00000000
mov x0, #0x1234, LSL #16 // x0 = 0x12340000
mov x1, #0xBEEF // x1 = 0xBEEF
movk x1, #0xDEAD, LSL #16 // x1 = 0xDEADBEEF
movk x1, #0xF00D, LSL #32 // x1 = 0xF00DDEADBEEF
movk x1, #0xFEED, LSL #48 // x1 = 0xFEEDF00DDEADBEEF
Note that immediates are prefixed with a #, that the
destination register appears to the left, and that LSL
specifies the left shift.
Only 16-bit immediates with optional shifts can be loaded into a
register. The assembler is able to figure out the right shift
value in many cases. For instance, the assembler is able to
convert mov x12, #(1 << 21) into a mov x12, 0x20, LSL #16
automatically.
Loading Addresses from Labels¶
Sections of assembly code can be labled using <label>::
add_30:
add x1, x1, #10
add x1, x1, #20
To load the address of the first instruction after the label, you
can either use the adr or ldr instructions:
adr x0, add_30 // x0 = address of first instruction of add_30
ldr x0, =add_30 // x0 = address of first instruction of add_30
You must use ldr if the label is not within the same linker
section as the instruction. If the label is within the same
section, you should use adr.
Moving Between Registers¶
You can move values between registers with the mov instruction
as well:
mov x13, #23 // x13 = 23
mov sp, x13 // sp = 23, x13 = 23
Loading from Special Registers¶
Special and system registers such as ELR_EL1 can only be
loaded/stored from other registers using the mrs and msr
instruction.
To write to a special register from another register, use msr:
msr ELR_EL1, x1 // ELR_EL1 = x1
To read from a special register into another register, use
mrs:
mrs x0, CurrentEL // x0 = CurrentEL
Arithmetic¶
The add and sub instruction can be used to perform
arithmetic. The syntax is:
add <dest> <a> <b> // dest = a + b
sub <dest> <a> <b> // dest = a - b
For example:
mov x2, #24
mov x3, #36
add x1, x2, x3 // x1 = 24 + 36 = 60
sub x4, x3, x2 // x4 = 36 - 24 = 12
The parameter <b> can also be an immediate:
sub sp, sp, #120 // sp -= 120
add x3, x1, #120 // x3 = x1 + 120
add x3, x3, #88 // x3 += 88
Logical Instructions¶
The and and orr instruction perform bitwise AND and
OR. Their usage is identical to that of add and sub:
mov x1, 0b11001
mov x2, 0b10101
and x3, x1, x2 // x3 = x1 & x2 = 0b10001
orr x3, x1, x2 // x3 = x1 | x2 = 0b11101
orr x1, x1, x2 // x1 |= x2
and x2, x2, x1 // x2 &= x1
and x1, x1, #0b110 // x1 &= 0b110
orr x1, x1, #0b101 // x1 |= 0b101
Branching¶
Branching is another term for jumping to an address. A branch
changes the PC to a given address or address of a label. To
unconditionally jump to a label, use the b instruction:
b label // jump to label
To jump to a label while storing the next address in the link
register, use bl. The ret instruction jumps to the address
in lr:
my_function:
add x0, x0, x1
ret
mov x0, #4
mov x1, #30
bl my_function // lr = address of `mov x3, x0`
mov x3, x0 // x3 = x0 = 4 + 30 = 34
The br and blr instruction are the same as b and
bl, respectively, but jump to an address contained in a
register:
ldr x0, =label
blr x0 // identical to bl label
br x0 // identical to b label
Conditional Branching¶
The cmp instruction compares values in two registers or a
register and an immediate and sets flags for future conditional
branching instructions such as bne (branch not equal), beq
(branch if equal), blt (branch if less than), and so on
(ref:
C1.2.4):
// add 1 to x0 until it equals x1, then call `function_when_eq`, then exit
not_equal:
add x0, x0, #1
cmp x0, x1
bne not_equal
bl function_when_eq
exit:
...
// called when x0 == x1
function_when_eq:
ret
Using an immediate:
cmp x1, #0
beq x1_is_eq_to_zero
Note that if the branch is not taken, execution simply continues forward.
Interface with Rust¶
Now go to the aarch64 subdirectory again and start reviewing the remaining
files. Here is brief description of each files in the library.
asm.rs- Internally use of inline assembly to wrap as a function.macros.rs- Define macros used in this libraryregs.rs- Define registers and provide their interface using macrossp.rs- Access to the stack pointervmsa.rs- Support virtual memory (described later)lib.rs- Include above modules; Has some useful functions such ascurrent_el().
As an example, the
get() and set() function in sp.rs allows you retrieve and
change the current stack pointer at any point in time. Similarly, the
current_el() function in lib.rs returns the exception level the
CPU is currently executing in, otherwise known as the
current exception level.
Recap¶
There are many more instructions in the ARMv8 instruction set. With these as a basis, you should be able to pick up most of the remaining instructions with ease. The instructions are documented in (ref: C3). For a concise reference of the instructions presented above, see this ISA cheat sheet by Griffin Dietz. Before continuing, answer the following questions:
How would you write memcpy in ARMv8 assembly? (asm-memcpy)
Assuming that the source address is in x0, the
destination address is in x1, and the number of bytes to
copy is in x2, which is guaranteed to be a non-zero
multiple of 8, how would you implement memcpy in ARMv8
assembly? Ensure you ret.
Hint
You can implement this in just 6 or 7 lines.
How would you write 0xABCDE to ELR_EL1? (asm-movk)
Assume you’re running in EL1, how would you write the
immediate 0xABCDE to ELR_EL1 using ARMv8 assembly?
Hint
You’ll need three instruction.
What does the cbz instruction do? (asm-cbz)
Read the documentation for the cbz instruction in
(ref:
C6.2.36). What does the instruction do? How would you use
it?
What does init.rs do? (init)
Up until lab 3, we used kern/src/init/init.s as the first piece of code
that runs in our kernel.
kern/src/init.rs now replaced that role.
In particular, the _start
function will be at address 0x80000 when the Raspberry Pi
boots, and the firmware will jump to this address as soon as
it is done initializing the system. Soon, you’ll modify this
file to switch to EL1 and setup exception vectors.
Read all of the code in kern/src/init.rs.
Then, for every function in the file,
explain what the code is doing.
For example, to explain the _start function, we might say:
“The [7:0] bits of the MPIDR_EL1 register
(ref:
D7.2.74) are read (Aff0), yielding the core number
that’s currently executing code. If the number is zero,
KERN_STACK_BASE(0x80_000) is set to stack pointer and kinit()
is called.
Hint
Refer to the manual for any instruction/register you’re not familiar with yet.
Hint
aarch64 library and kern/src/param.rs will be
needed while reviewing init.rs
Subphase C: Switching to EL1¶
In this subphase, you will write the Rust code to switch from
EL2 to EL1. You will be working primarily in
kern/src/init.rs and kern/src/main.rs. We
recommend that you only proceed to this subphase after you have
answered the questions from the previous subphases.
Current Exception Level¶
As mentioned before, the CPU should be running in EL2 when our
kernel is called. Confirm this now by printing the current
exception level in kmain(). Note that you’ll need to use
unsafe to call current_el(); we’ll remove this call once we’ve
confirmed that we’ve switched to EL1 successfully. current_el() is
in the lib/aarch64 library and you need to add it to solve dependency
issue.
Switching¶
Now, you’ll finish writing the assembly to switch to EL1. Find the
line in kern/src/init.rs marked:
// FIXME: eret to itself, expecting current_el() == 1 this time
Above this line, you’ll see following code.
SPSR_EL2.set(
(SPSR_EL2::M & 0b0101)
| SPSR_EL2::F
| SPSR_EL2::I
| SPSR_EL2::D
| SPSR_EL2::A,
);
From the previous subphase, you should know what these do. In
particular, you should know which bits are being set in
SPSR_EL2 and what the implications will be if an eret
occurs thereafter.
Complete the switching routine now by replacing the FIXME with
the proper code. Ensure that on the switch to EL1, the CPU
jumps to switch_to_el1 recursively with the proper exception level to
bypass the internal check current_el() == 2 and just move on to kmain().
You’ll need exactly two lines of code to complete
the routine. Recall that the only way to decrease the exception
level is via an eret. Once you have completed the routine,
ensure that current_el() now returns 1.
Hint
Which register is used to set the PC on exception return?
Subphase D: Exception Vectors¶
In this subphase, you’ll setup and install exception vectors and
an exception handler. This will be the first step towards enabling
your kernel to handle arbitrary exceptions and interrupts. You’ll
test your exception vector and exception handling code by
implementing a tiny debugger that starts in response to a
brk #n instruction. You will be working primarily in
kernel/src/init/vectors.s, kernel/src/traps.rs and the
kernel/src/traps directory.
Overview¶
Recall that the vector table consists of 16 vectors, where each
vector is a series of at most 16 instructions. We’ve set apart
space in vectors.s for these vectors and have placed the
vectors label at the base of the table. This vectors.s file
will be included to init.rs with global_asm! macro.
Your task will be to populate the table with the 16 vectors such
that, ultimately, the
handle_exception Rust function in kernel/src/traps.rs
is called with the proper arguments when an exception occurs. All
exceptions will be routed to the handle_exception function.
The function will determine why an exception has occurred and
dispatch the exception to higher-level handlers as needed.
Calling Convention¶
In order to properly call the handle_exception function
declared in Rust, we must know how the function expects to be
called. In particular, we must know where the function should
expect to find the values for its parameters info, esr,
and tf, what it promises about the state of the machine after
the function is called, and how it will return to the site of the
function call.
This problem of knowing how to call foreign functions arises whenever one language calls into another (as in lab 3 between C and Rust). Instead of having to know how every language expects its functions to be called, calling conventions are established. A calling convention, or procedure call standard, is a set of rules that dictates the following:
How to pass parameters to a function.
On AArch64, the first 8 parameters are passed in registers
r0…r7, in that order from left-to-right.How to return values from a function.
On AArch64, the first 8 return values are passed in registers
r0…r7.Which state (registers, stack, etc.) the function must preserve.
Registers are usually categorized as either caller-saved or callee-saved.
A caller-saved register is not guaranteed to be preserved across a function call. Thus, if the caller requires the value in the register to be preserved, it must save the register’s value before calling the function.
On the contrary, a callee-saved register is guaranteed to be preserved across a function call. Thus, if a callee wishes to use the register during the function call, it must save the register’s value before doing so and restore it before returning.
Register values are typically saved and restored by pushing and popping from the stack.
On AArch64, registers
r19…r29andSPare callee-saved. The remaining general purpose registers are caller-saved. Note that this includeslr(x30). SIMD/FP registers have complicated saving rules. For our purposes, it suffices to say that they are all caller-saved.How to return to the caller.
On AArch64, the
lrregister holds the link address: the address the callee should jump to when it returns. Theretinstruction branches tolr, so it often terminates a function.
The AArch64 calling convention is described in
(guide:
9) as well as in the official procedure call
standard
documentation. When you call the handle_exception Rust
function from assembly, you’ll need to ensure that you adhere to
this calling convention.
How does Rust know which convention to use?
Strictly adhering to a calling convention precludes all kinds
of optimizations on function calls and bodies. As a result,
Rust’s functions are not guaranteed to abide to a particular
calling convention by default. To force Rust to compile a
function exactly according to the calling convention of the
target platform, the extern function qualifier can be used.
We’ve already declared handle_exception as extern, so
we can be sure that Rust will compile the function
appropriately.
Vector Table¶
To help you populate the vector table, we’ve provided the
HANDLER source, kind macro which expands to a series of 8
instructions aligned to the next valid vector entry. When
HANDLER a, b is used as an “instruction”, it expands to the
lines that reside between .macro and .endm.
In other words, this:
vectors:
HANDLER 32, 39
Expands to the following:
vectors:
.align 7
stp lr, xzr, [SP, #-16]!
stp x28, x29, [SP, #-16]!
mov x29, #32
movk x29, #39, LSL #16
bl context_save
ldp x28, x29, [SP], #16
ldp lr, xzr, [SP], #16
eret
The expanded code pushes lr, xzr, x28 and x29 to the stack,
creates a 32-bit value in x29 where the lower 16-bits are source and
the upper 16-bits are kind, and calls the context_save
assembly function (declared above vectors in vectors.s).
When that function returns, it restores saved four registers from the stack and
finally returns from the exception.
The context_save function currently does nothing: it simply
falls through to a ret from context_restore below. Soon,
you will modify the context_save function so that it correctly
calls the handle_exception Rust function.
Syndrome¶
When a synchronous exception occurs (an exception caused by the
execution or attempted execution of an instruction), the CPU sets
a value in a syndrome register (ESR_ELx) that describes the
cause of the exception
(ref:
D1.10.4). We’ve set up structures in
kernel/src/traps/syndrome.rs that should parse the syndrome
value into a meaningful Syndrome enum. You will soon write
code that passes the ESR_ELx value to the Rust function as the
esr parameter. You’ll then use Syndrome::from(esr) to
parse the syndrome value which determines what to do next.
Info¶
The handle_exception Rust function takes an Info structure
as the first parameter. The structure has two 16-bit fields:
the first corresponds to the source, and the second corresponds to
the kind of exception. As you may have guessed, this is
exactly the 32-bit value that the HANDLE macro sets up in
x29. You’ll need to move this x29 to x0 within context_save code
block in order to pass it as the first parameter.
In addition, please ensure that you use the correct HANDLE
invocations for the correct entries so that the Info structure
is correctly created.
Implementation¶
You’re now ready to implement preliminary exception handling code.
The first exception you will handle is the brk exception (a
software breakpoint). When such an exception occurs, you’ll start
up a shell that would theoretically allow you explore the state of
the machine at that point in its execution.
Start by inserting a call to brk in main.rs. Instead of using inline
assembly, you can call brk macro defined in asm.rs of aarch64
library.
Then, proceed as follows:
Populate the
vectorstable using theHANDLEmacro.Ensure that your entries would correctly create the
Infostructure. Refer to (guide: 10.4) to check the entry order. Thesourceandkindof handler should be matched withSourceandKindenum insrc/traps.rs.Call the
handle_exceptionfunction incontext_save.Ensure that you save/restore any caller-saved registers as needed and that you pass the appropriate parameters. For now, you can pass in
0for thetfparameter; we’ll be using this later. Refersrc/traps.rsto see what to pass for arguments.Note: AArch64 requires the
SPregister to be 16-byte aligned whenever it is used as part of a load or store. Ensure that you keepSP16-byte aligned at all times.Setup the correct
VBARregister at the comment marked ininit.rs.// FIXME: load `vectors` addr into appropriate register (guide: 10.4)At this point, your
handle_exceptionfunction should be called whenever an exception occurs.In
handle_exception, print the value of theinfoandesrparameters and ensure that they are what you expect. Then, loop endlessly in the handler. You’ll want to callaarch64::nop()in the loop to ensure it doesn’t get optimized away. We will need to write more code to properly return from the exception handler, so we’ll simply loop for now. We will fix this in the next subphase.Implement the
Syndrome::from()and theFault::from()methods.The former should call the latter. You’ll need to refer to (ref: D1.10.4, ref: Table D1-8) to implement these correctly. Clicking on the “ISS encoding description” in the table gives you details about how to decode the syndrome for a particular exception class as well as decode for
Fault. You should ensure, for example, that abrk 12is decoded asSyndrome::Brk(12). Similarly, asvc 77should be parsed as aSyndrome::Svc(77). Note that we have excluded the 32-bit variants of some exceptions and coalesced exceptions when they are identical but occur with differing exception classes.Use aarch64 library!
Instead of using inline assembly and raw bit operation for each register, use pre-defined registers and functions in
aarch64library to your advantage. You will findREG_NAME::get_value(raw_value, REG_NAME::MASK)function useful.Start a shell when a
brkexception occurs.Use your
Syndrome::from()method inhandle_exceptionto detect abrkexception. When such an exception occurs, start a shell. You may wish to use a different shell prefix to differentiate between shells. Note that you should only callSyndrome::from()for synchronous exceptions. TheESR_ELxregister is not guaranteed to hold a valid value otherwise.At this point, you’ll also need to modify your shell to implement a new command:
exit. Whenexitis called, your shell should end its loop and return. This will allow us to exit from abrkexception later. Because of this change, you’ll also need to wrap your invocation toshell()in kmain in aloop { }to prevent your kernel from exiting and crashing.
Once you are finished, the brk 2 instruction in kmain
should result in an exception with syndrome Brk(2), source
CurrentSpElx, and kind Synchronous being routed to the
handle_exception function. At that point, a debug shell should
start. When exit is called from the shell, the shell should
terminate, and the exception handler should begin to loop
endlessly.
Before proceeding, you should ensure that you detect other
synchronous exceptions correctly. You should try calling other
exception-causing instructions such as svc 3. You should also
try purposefully causing a data or instruction abort by jumping to
an address outside of the physical memory range.
Once everything works as expected, you’re ready to proceed to the next phase.
Subphase E: Exception Return¶
In this subphase, you will write the code to enable correct
returns from an exception of any kind. You will be working
primarily in kern/init/vectors.s, kern/src/traps.rs and the
kern/src/traps directory.
Overview¶
If you try removing the endless loop in handle_exception now,
your Raspberry Pi will likely enter an exception loop, where it
repeatedly enters the exception handler, or crash entirely when
you exit from your debug shell. This is because when your
exception handler returns to whatever code was running previously,
the state of the processor (its registers, primarily) has changed
without the code accounting for it.
As an example, consider the following assembly:
1: mov x3, #127
2: mov x4, #127
3: brk 10
4: cmp x3, x4
5: beq safety
6: b oh_no
When the brk exception occurs, your exception vector will be
called, eventually calling handle_exception. The
handle_exception function, as compiled by Rust, will make use
of the x3 and x4 registers (among others) for processing.
If your exception handler returns to the site of the brk call,
the state of x3 and x4 is unknown, and the beq safety
instruction on line 5 is not guaranteed to branch to safety.
As a result, in order for our exception handler to be able to use the machine as it desires, we’ll need to ensure that we save all of the processing context (the registers, etc.) before we call our exception handler. Then, when the handler returns, we’ll need to restore the processing context so that the previously executing code continues to execute flawlessly. This process of saving and restoring a processing context is known as a context switch.
What makes it a context switch?
The inclusion of the word switch can be a bit deceiving. After all, aren’t we simply returning to the same context?
In fact, we rarely want to return to the same context. Instead,
we typically want to modify the context before we return so
that the CPU executes things just a little bit differently. For
example, when we implement process switching, we’ll swap out
the context of one process for another’s, multiplexing CPU
time. When we implement system calls, we’ll modify the values
of registers to inject return values. And finally, when we
return from a breakpoint exception, we’ll need to modify the
return address in ELR so that the next instruction
executes instead of the same one.
Soon, you’ll write the code to save all of the processing context
into a structure known as a trap frame. You’ll finish the
definition of the TrapFrame structure in
kern/src/traps/frame.rs so that you can access and
modify the trap frame from Rust, and you’ll write the assembly to
save and restore the trap frame as well as pass a pointer to the
trap frame to the handle_exception function in the tf
parameter.
Trap Frame¶
The trap frame is the name we give to the structure that holds all of the processing context. The name “trap frame” comes from the term “trap” which is a generic term used to describe the mechanism by which a processor invokes a higher privilege level when an event occurs. We say that the processor traps to the higher privilege level.
There are many ways to create a trap frame, but all approaches are effectively the same: they save all of the state necessary for execution in memory. Most implementations push all of the state onto the stack. After pushing all of the state, the stack pointer itself becomes a pointer to the trap frame. We’ll be taking exactly this approach.
For now, the complete execution state of our Cortex-A53 consists of:
x0…x30 - all 64-bits of all 31 general purpose registers
q0…q31 - all 128-bits of all SIMD/FP registers
TPIDR - the 64-bit “thread ID” register
This is stored in
TPIDR_ELswhen the source of the exception is at levels.sp - the stack pointer
This is stored in
SP_ELswhen the source of the exception is at levels.PSTATE - the program state
Recall that this is stored in
SPSR_ELxwhen an exception is taken toELx.pc - the program counter
The register
ELR_ELxstores the preferred link address, which may or may not be the PC that the CPU had when the exception is taken. Typically, theELR_ELxis either the PC when the exception is taken, orPC + 4.
We’ll need to save all of this context in the trap frame by pushing the relevant registers onto the stack before calling the exception handler and then restore the trap frame by popping from the stack when the handler returns. After saving all of the state, the stack should look as follows:

Please double check each register whether it uses _ELx or _ELs.
Note that SP and TPIDR in the trap frame should be the
stack pointer and thread ID of the source, not the target. Since
the only eventual source of exception will be EL0, you should
save/restore the SP_EL0 and TPIDR_EL0 registers. When all
state has been pushed, the CPU’s true SP (the one used by the
exception vector) will point to the beginning of the trap frame.
Finally, you’ll pass a pointer to the trap frame as the third
argument to handle_exception. The type of the argument is
&mut TrapFrame; TrapFrame is declared in
kern/src/traps/frame.rs. You’ll need to define the
TrapFrame struct so that it exactly matches the trap frame’s
layout.
What’s a thread ID?
The TPIDR register (TPIDR_ELx) allows the operating
system to store some identifying information about what’s
currently executing. Later, when we implement process, we’ll
store the process’s ID in this register. For now, we’ll save
and restore this register for posterity.
Preferred Exception Return Address¶
When an exception is taken to ELx, the CPU stores a preferred
link address, or preferred exception return address in
ELR_ELx. This value is defined in
(ref:
D1.10.1) as follows:
For asynchronous exceptions, it is the address of the first instruction that did not execute, or did not complete execution, as a result of taking the interrupt.
For synchronous exceptions other than system calls, it is the address of the instruction that generates the exception.
For exception generating instructions, it is the address of the instruction that follows the exception generating instruction.
A brk instruction falls into the second category. As such, if
we want to continue execution after a brk instruction, we’ll
need to ensure that ELR_ELx contains the address of the next
instruction before returning. Since all instructions are 32-bits
wide on AArch64, this is simply ELR_ELx + 4.
Implementation¶
Start by implementing the context_save and context_restore
routines in kern/init/vectors.s. The context_save routine
should push all of the relevant registers onto the stack and then
call handle_exception, passing a pointer to the trap frame as
the third argument. Then implement context_restore, which
should do nothing more than restore the context.
Note that the instructions generated by the HANDLER macro
already save and restore x28, x29, x30(lr), and x31(xzr).
You should not save and restore these registers in your
context_{save,restore} routines,
but your trap frame must still contain these registers.
Technically there is no need to save and restore xzr register
since it always contains zero.
We save it just to make SP 16-byte aligned.
To minimize the impact on performance for the context switch, you should push/pop registers from the stack as follows:
// pushing registers `x1`, `x5`, `x12`, and `x13`
stp x1, x5, [SP, #-16]!
stp x12, x13, [SP, #-16]!
// popping registers `x1`, `x5`, `x12`, and `x13`
ldp x1, x5, [SP], #16
ldp x12, x13, [SP], #16
Once you have implemented these routines, finish defining
TrapFrame in kern/src/traps/frame.rs. Ensure that
the order and size of the fields exactly match the trap frame you
create and pass a pointer to in context_save.
Finally, in handle_exception, remove the endless loop and
increment the ELR in the trap frame by 4 before returning
from a brk exception.
Once you have successfully implemented the context switch, your
kernel should continue to run as normal after exiting from
the debug shell. When you are ready, proceed to the next phase.
Trap Frame Layout
Your trap frame doesn’t need to exactly match the diagram, but it should contain all of the same data.
q0 .. q31
Don’t forget that the qn registers are 128-bits wide!
Hint
To call handle_exception, you’ll need to save/restore
a register that’s not part of the trap frame.
Hint
Rust has two 128-bit integer types: u128 and i128.
Hint
Use the mrs and msr instruction to read/write
special registers.
Hint
Our context_save routine is exactly 42 instructions.
Hint
Our context_restore routine is exactly 37 instructions.
Hint
Our TrapFrame contains 6 fields (two of them are arrays)
and is 792 bytes in size without xzr register.
How could you lazy-load floating point registers? (lazy-float)
Saving and restoring the 128-bit SIMD/FP registers is very
expensive; they account for 512 of the 792 bytes in the
TrapFrame! It would be ideal if we saved/restored these
registers only if they were actually in use by the source of
the exception or the target of a context switch.
The AArch64 architecture allows the use of these registers
to be selectively enabled and disabled. When SIMD/FP is
disabled, an instruction that uses the registers traps. How
could you use this functionality to implement lazy-loading
of SIMD/FP registers so that they’re only saved/restored on
context switches if they’re being used while continuing to
allow the registers and SIMD/FP instructions to be used
freely? Be specific about what you would do when specific
exceptions occur, whether you would need to modify the
TrapFrame struct, and what additional state you’d need
to maintain.
Phase 2: It’s a Process¶
In this phase, you will implement user-level processes. You’ll
start by implementing a Process struct that will maintain a
process’s state. You’ll then bootstrap the system by starting the
first process. Then, you’ll implement a tick-based, round-robin
scheduler. To do so, you’ll first implement an interrupt
controller driver and enable timer interrupts. Then, you’ll invoke
your scheduler when a timer interrupt occurs, performing a context
switch to the next process. Finally, you’ll implement your first
system call: sleep.
After completing this subphase, you’ll have built a minimal but complete multitasking operating system. For now, processes will be sharing physical memory with the kernel and other processes. In the next phase, we will enable virtual memory to isolate processes from one another and protect the kernel’s memory from untrusted processes.
Subphase A: Processes¶
In this subphase, you’ll complete the implementation of the
Process structure in kern/src/process/process.rs. You’ll
use your implementation to start the first process in the next
subphase.
What’s a Process?¶
A process is a container for code and data that’s executed, managed, and protected by the kernel. They are the singular unit by which non-kernel code executes: if code is executing, it is either executing as part of a process or executing as part of the kernel. There are many operating system architectures, especially in the research world, but they all have a concept that largely mirrors that of a process.
Processes typically run with a reduced set of privileges (EL0
for our OS) so that the kernel can ensure system stability and
security. If one process crashes, we don’t want other processes to
crash or for the entire machine to crash with it. We also don’t
want processes to be able to interfere with one another. If one
process hangs, we don’t want other processes to be unable to make
progress. Processes provide isolation: they operate largely
independently of one another. You likely see these properties of
processes every day: when your web browser crashes or hangs, does
the rest of the machine crash or hang as well?
Implementing processes, then, is about creating the structures and algorithms to protect, isolate, execute, and manage untrusted code and data.
What’s in a Process?¶
To implement processes, we’ll need to keep track of a process’s code and data as well as auxiliary information to allow us to properly manage and isolate multiple processes. This means keeping track of a process’s:
Stack
Each process needs a unique stack to execute on. When you implement processes, you’ll need to allocate a section of memory suitable for use as the process’s stack. You’ll then need to bootstrap the process’s stack pointer to point to this region of memory.
Heap
To enable disjoint dynamic memory allocation, each process will also have its own heap. The heap will start empty but can be expanded on request via a system call. In lab 4, we won’t implement the heap and will support user programs that only require the stack.
Code
A process isn’t very useful unless it’s executing code, so the kernel will need to load the process’s code into memory and execute it when appropriate.
Virtual address space
Because we don’t want processes to have access to the kernel’s memory or the memory of other processes, each process will be confined to a separate virtual address space using virtual memory.
Scheduling state
There are typically many more processes than there are CPU cores. The CPU can only execute one instruction stream at a time, so the kernel will need to multiplex the CPUs time (and thus, instruction stream) to execute processes concurrently. It is the scheduler’s job to determine which process gets to run when and where. To do so correctly, the scheduler needs to know if a process is ready to be scheduled. The scheduling state keeps track of this.
Execution state
To correctly multiplex the CPUs time amongst several processes, we’ll need to ensure that we save a process’s execution state when we switch it off the CPU and restore it when we switch it back on. You’ve already seen the structure we use to maintain execution state: the trap frame. Each process maintains a trap frame to properly maintain its execution state.
A process’s stack, heap, and code make up all of the physical state of a process. The rest of the state is necessary for the isolation, management, and protection of processes.
The Process structure in kernel/src/process/process.rs
will maintain all of this information. Because all processes will
be sharing memory for the time being, you won’t see any fields for
the process’s heap, code, or virtual address space; you’ll handle
these later in the assignment.
Does a process have to trust the kernel? (kernel-distrust)
It should be clear that a kernel is distinctively distrustful of processes, but does a process have to trust the kernel? If so, what is it expecting from the kernel?
What could go wrong if two processes shared stacks? (isolated-stacks)
Imagine that two processes are executing concurrently and are sharing a stack. First: what would it mean for two processes to share a stack? Second: why would it be very likely that the processes would crash fairly quickly into their lives? Third: define a property of processes that, even if they were sharing a stack, would never crash as a result of sharing a stack. In other words, what would two processes that run concurrently and share a stack but never crash as a result of this sharing look like?
Implementation¶
You’ll now start the implementation of the Process structure
in kern/src/process/process.rs. Before you begin, read the
implementation of the Stack structure that we provided for you
in kern/src/process/stack.rs. Ensure that you know how to
use the structure to allocate a new stack and retrieve a pointer
to the stack for a new process. Then, read the implementation of
the State structure, which will be used to keep track of the
scheduling state, that we have provided for you in
kern/src/process/state.rs. Try to reason about how you’d
interpret the different variants when scheduling processes.
Finally, only implement the Process::new() method. The
implementation will be simple; there’s nothing complex about
keeping track of state! You will finish the implementation of the process
structure later on. When you’re ready, proceed to the next
subphase.
How is the stack’s memory reclaimed? (stack-drop)
The Stack structure allocates a 16-byte aligned 1MiB
block of memory when it is created. What ensures that this
memory is freed when the Process that owns it is no
longer around?
How could you lazily allocate memory for the stack? (lazy-stacks)
The Stack structure allocates 1MiB of memory for the
stack regardless of whether or how much of the stack the
process actually uses. Thinking ahead to virtual memory, how
might we use virtual memory to lazily allocate memory for
the stack so that no or minimal memory is used by the stack
until it’s needed?
How could a process increase its stack size? (stack-size)
Some processes will require significantly more stack space than 1MiB, but our simple design allocates exactly 1MiB of stack space for all processes. Assuming processes have access to dynamic memory allocation, how could a process increase its stack size? Be specific about which instructions the process would execute.
Subphase B: The First Process¶
In this subphase, we’ll start the first user-space (EL0)
process. You will be working primarily in
kern/src/process/scheduler.rs and kern/src/main.rs.
Context Switching Processes¶
You’ve already done most of the work that will allow you to context switch between processes. To context switch between processes in response to an exception, you will:
Save the trap frame as the current process’s trap frame in its
contextfield.Restore the trap frame of the next process to execute from its
contextfield.Modify the scheduling state to keep track of which process is executing.
Unfortunately, to context switch into the first process, we’ll need to deviate from this plan a bit. It would be incorrect to execute one of the steps above before the first process. Can you tell which?
Let’s see what would happen if we followed these steps before the
first process. First, an exception occurs which prompts a context
switch. We’ll later see that this will be a timer interrupt which drives the
process scheduler. Then we follow step 1: in response to the exception, we
store the current trap frame in the current process’s context field. Note,
however, that there is no current process yet! And so Later, as
part of step 2, we restore the next process’s context and
return.
Because the exception wasn’t taken while the process running, the trap frame we save, and later restore, will have little in relation to the process itself. In other words, we’ve clobbered the process’s trap frame with an unrelated one. Thus, we can’t possibly run step 1 without a valid process’s trap frame first. In other words, to properly context switch into the first process, it seems that the process needs to already be running. Said yet another way, we can’t properly context switch until after the first context switch has occurred: catch-22!
To work around this, we’re going to bootstrap context switching by
faking the first context switch. Instead of the trap frame for
the first process coming from the context_save routine you
wrote previously, we will manually create the trap frame on the
new process’s stack and call context_restore ourselves,
avoiding step 1 above entirely. Once the first process is running,
all other context switching will work normally.
Kernel Threads¶
We haven’t yet built a mechanism to load code from the disk into memory. Once we enable virtual memory, we’ll need to implement the procedures to do so. For now, while we’re sharing memory with the kernel, we can simply reuse the kernel’s code and data. As long as the kernel and the processes don’t share local data (the stack), which we’ve ensured they don’t by allocating a new stack for each process, they will be able to execute concurrently without issue. What’s more, Rust ensures that there is no possibility of a data race between the processes.
Sharing memory and other resources between processes is such a common occurrence that these types of processes have a special name: threads. Indeed, a thread is nothing more than a process that shares memory and other resources with another process.
Soon, you’ll start the first process. Because that process will be sharing memory with the kernel, it will be a kernel thread. As such, the extent of the work required to start this first process is minimal since all of the code and data is already in memory:
Bootstrap context switching by setting up the “fake” saved trap frame.
Call
context_restoreSwitch to
EL0.
While requiring very few lines of code, you’ll find that it requires careful implementation for correctness.
The term kernel thread is overloaded.
The term kernel thread is used to refer both to threads implemented by the kernel (as opposed to threads implemented in user space) and threads running in the kernel. It’s an unfortunate name clash, but context typically clarifies which is meant. As a quick heuristic, unless the discussion is about OS development, you should assume that the discussion is about threads implemented by the kernel.
Implementation¶
There is a new global variable in kern/src/main.rs, SCHEDULER, of
type GlobalScheduler, which is simply a wrapper around a
Scheduler. Both of these types are defined in
kern/src/process/scheduler.rs. The SCHEDULER variable
will serve as the handle to the scheduler for the entire system.
To initialize the scheduler and start executing the first process,
the start() method on GlobalScheduler should be called.
Your task is to implement the start() method.
To do so, you will need to:
Write an
externfunction that takes no parameters and starts a shell.You will arrange for this function to be called when the process first executes. You can write this function wherever you’d like. We’ll remove it once we’re able to start processes backed by binaries on the disk.
In
start(), create a newProcessand set-up the saved trap-frame.You’ll need to set up the process’s trap frame so that when it is restored to the CPU by
context_restorelater, yourexternfunction executes, the process’s stack pointer points to the top of the process’s stack, the process is executing inEL0in the AAarch64 execution state, and IRQ interrupts are unmasked for currentEL1so that we can handle timer interrupts fromEL0in the next section.Setup the necessary registers, call
context_restore, anderetinto EL0.Once you’ve set up the trap frame, you can bootstrap a context switch to that process by:
Calling
context_restorewith the appropriate register(s) set to the appropriate values.Note: we are being vague here on purpose! If this feels opaque, consider what
context_restoredoes, what you want it to do, and how you can make it do that.Setting the current stack pointer (
sp) to its initial value (the address of_start). This is necessary so that we can use the entireEL1stack when we take exceptions later. Note: You cannotldroradrintospdirectly. You must first load into a different register and thenmovfrom that register intosp.Resetting any registers that may no longer contain
0. You should not leak any information to user-level processes.Returning to
EL0viaeret.
You’ll need to use inline assembly to implement this. As an example, if a variable
tfis a pointer to the trap frame, the following sets the value ofx0to that address and then copies it tox1:unsafe { asm!("mov x0, $0 mov x1, x0" :: "r"(tf) :: "volatile"); }
You may wish to add an infinite loop at the end of the
start() function to satisfy compiler since the function should not be
returned. Once you’ve implemented the method, add a call to
SCHEDULER.start() in kmain and remove any shell or
breakpoint invocations. You don’t need to call SCHEDULER.initialize()
yet which will be implemented in Subphase D. Your kmain should now simply be a
series of two initialization calls and a scheduler starting call such as below.
unsafe fn kmain() -> ! {
ALLOCATOR.initialize();
FILESYSTEM.initialize();
SCHEDULER.start()
}
If all is well, your extern function will be called
from EL0 when the kernel starts, running the shell as a
user-level process.
Before continuing, you should also ensure that a context switch
back to the same process works correctly at this point. Try adding
a few calls to brk in your extern function before and
after you start a shell:
extern fn run_shell() {
unsafe { asm!("brk 1" :::: "volatile"); }
unsafe { asm!("brk 2" :::: "volatile"); }
shell::shell("user0> ");
unsafe { asm!("brk 3" :::: "volatile"); }
loop { shell::shell("user1> "); }
}
You should be able to return from each of the break point
exceptions successfully. The source for each of the breakpoint
exception should be LowerAArch64, indicating a successful
switch to user-space. Once everything works as you expect, proceed
to the next subphase.
Hint
Our inline assembly consists of exactly 6 instructions.
Hint
Besides the inline assembly, you do not need unsafe.
Subphase C: Timer Interrupts¶
In this subphase, you will implement a driver for the interrupt
controller on the BCM2837. You’ll also modify your existing system
timer driver to enable timer interrupts to be configured. Finally,
you’ll enable periodic timer interrupts to act as the spring-board
for scheduling based context switches. You will be working
primarily in lib/pi/src/interrupt.rs, lib/pi/src/timer.rs,
and kern/src/traps.
Interrupt Handling¶
On AArch64, interrupts are nothing more than exceptions of a particular class. The key differentiator between the two is that interrupts occur asynchronously: they are generated by an external source in response to external events.
The diagram below illustrates the path an interrupt takes from the source, an external device, to the sink, an exception vector:

Interrupts can be selectively disabled at each point along the path. In order for an interrupt to be delivered to an exception vector, the external device, the interrupt controller, and the CPU must all be configured to accept the interrupt.
What is an interrupt controller?
An interrupt controller as another external device that acts as a proxy and gate between interrupt generating devices, like the system timer, and the CPU. The interrupt controller is physically connected to the CPU’s interrupt pins. When an input pin on the interrupt controller is signaled, the interrupt controller forwards the signal to the CPU.
The extra layer of indirection allows for interrupts to be selectively enabled and disabled. It also allows CPU manufacturers to choose which, if any, interrupt controller they want to bundle with the CPU.
External Device¶
You’ve already written a device driver for the system timer. In this subphase, you will extend your driver to enable configuration of the timer’s compare registers. The system timer continuously compares the current time to the values in the compare registers and generates an interrupt when the values equal.
Interrupt Controller¶
The system timer delivers interrupts to the interrupt controller, which must then be configured to deliver interrupts to the CPU. You will write a device driver for the interrupt controller to do exactly this.
When the interrupt controller receives an interrupt, it marks the interrupt as pending and forwards it to the CPU by holding a physical interrupt pin on the CPU logically high. For some interrupts, including system timer interrupts, the pin is held high until the interrupt is acknowledged. This means that the interrupt will be continuously delivered until it is acknowledged. Once the interrupt is acknowledged, the interrupt pin is released, and the pending flag is unset.
CPU¶
Interrupts must be unmasked for the CPU to deliver them to exception vectors. By default, interrupts are masked by the CPU, so they will not be delivered. The CPU may deliver interrupts that were received while interrupts were masked as soon as interrupts are unmasked. When the CPU invokes an exception vector, it also automatically masks all interrupts. This is so that interrupts which are held high until they are handled, like system timer interrupts, don’t immediately result in an exception loop.
In the previous subphase, you configured interrupts to be
delivered when processes are executing in EL0, so there’s no
additional work to do on this front.
When would you unmask IRQs while handling an IRQ? (reentrant-irq)
Although our kernel keeps IRQs masked in exception handling routine, thus does not support nested interrupt handling, it turns out that unmasking IRQs while handling IRQs is a fairly common occurrence in commodity operating systems. Can you come up with a scenario in which you’d want to do this? Further, would doing so without first acknowledging pending IRQs result in an exception loop? Why or why not?
Exception Vector¶
You’ve already configured exception vectors. As such, all that’s
left is to properly handle IRQ (interrupt request) exceptions.
To handle interrupts, we have a global Irq struct which holds a
list of handler functions for corresponding interrupt.
You can set a handler function for each interrupt by calling register()
function and execute the registered handler with invoke() function
in kern/src/traps/irq.rs.
You’ll modify your handle_exception function in
kern/src/traps.rs so that it forwards all known
interrupt requests to the invoke() function.
To determine which interrupt has
occurred, you will need to check which interrupts are pending at
the interrupt controller. The handle_irq function will then
acknowledge the interrupt and process it.
Implementation¶
Start by implementing the interrupt controller driver in
lib/pi/src/interrupt.rs. The documentation for the interrupt
controller is on chapter 7 of the BCM2837 ARM Peripherals
Manual.
You only need to handle enabling, disabling, and checking the
status of the regular IRQs described by the Interrupt enum;
you needn’t worry about FIQs or Basic IRQs.
We are providing four methods for Interrupt struct. iter() methods
can be used when iterating interrupts to check which interrupts are
pending. to_index() and from_index() would be useful when implementing
register() and invoke() method.
Then, implement the tick_in() method and function for your
system timer driver in lib/pi/src/timer.rs. The documentation for
the system timer is on chapter 12 of the BCM2837 ARM Peripherals
Manual.
You will need write to two registers to implement tick_in()
correctly.
Now go to the src/traps/irq.rs and implement register() and
invoke() methods. The Irq struct internally holds a list of
IrqHandler which is a smart pointer for a handler function.
You can set a new handler function for an interrupt with register()
method, and executes it with invoke() method.
Then, enable timer interrupts and set a timer interrupt to occur
in TICK microseconds just before you start the first process
in GlobalScheduler::start() in
kern/src/process/scheduler.rs. The TICK variable is
declared in kern/src/param.rs.
In addition, register an handler function for the timer.
The handler function should set a new timer interrupt to occur in
TICK microseconds, ensuring that timer interrupts occur every
TICK microseconds indefinitely. To test your implementation,
you might want to print a message in here.
Modify your handle_exception function in
kern/src/traps.rs so that it forwards known interrupts
to the invoke() function in kern/src/traps/irq.rs.
Finally, add IRQ.initialize() in your kern/src/main.rs before
calling SCHEDULER.start().
When you are finished, you should see a timer interrupt occur
every TICK microseconds with a source of LowerAArch64 and
kind of Irq. You should be able to interact with the process
normally between timer interrupts. When everything works as you
expect, proceed to the next subphase.
We’ll change the TICK setting later on!
We’re currently using an absurdly slow TICK setting of 2
seconds to ensure that everything works as we expect.
Typically, this number is between 1 and 10 milliseconds. We’ll
decrease the TICK to a more reasonable 10 ms later on.
Subphase D: Scheduler¶
In this subphase, you will implement a simple round-robin
preemptive scheduler. You will be working primarily in
kern/src/process/scheduler.rs and kern/src/process/process.rs.
Scheduling¶
The scheduler’s primary responsibility is to determine which task to execute next, where a task is defined as anything that requires execution on the CPU. Our operating system is relatively simple, and so the scheduler’s idea of a task will be constrained to processes. As such, our scheduler will be responsible for determining which process to run next, if any.
There are many scheduling algorithms with a myriad of properties.
One of the simplest is known as “round-robin” scheduling. A
round-robin scheduler maintains a queue of tasks. The next task to
execute is chosen from the front of the queue. The scheduler
executes the task for a fixed time slice (the TICK), also
known as a quantum. When the task has executed for at most its
full quantum, the scheduler moves it to the back of the queue.
Thus, a round-robin scheduler simply cycles through a queue of
tasks.
In our operating system, the scheduler marks a task as being in one of four states:
Ready
A task that is ready to be executed. The scheduler will execute the task when its turn comes up.
Running
A task that is currently executing.
Waiting
A task that is waiting on an event and is not ready to be executed until that event occurs. The scheduler will check if the event has occurred when the task’s turn comes up. If the event has occurred, the task is executed. Otherwise, the task loses its turn and is checked again in the future.
Dead
A task is currently dead (not running nor eligible to run) and ready to be reclaimed.
The State enum in kern/src/process/state.rs represents
these states. Each process struct is associated with a State
which the scheduler will manage. Note that the Waiting state
contains a function that the scheduler can use to determine if the
event being waited on has occurred.
The diagram below depicts four scheduling rounds of a round-robin
scheduler. The task C is waiting on an event that occurs some
time between rounds 3 and 4.
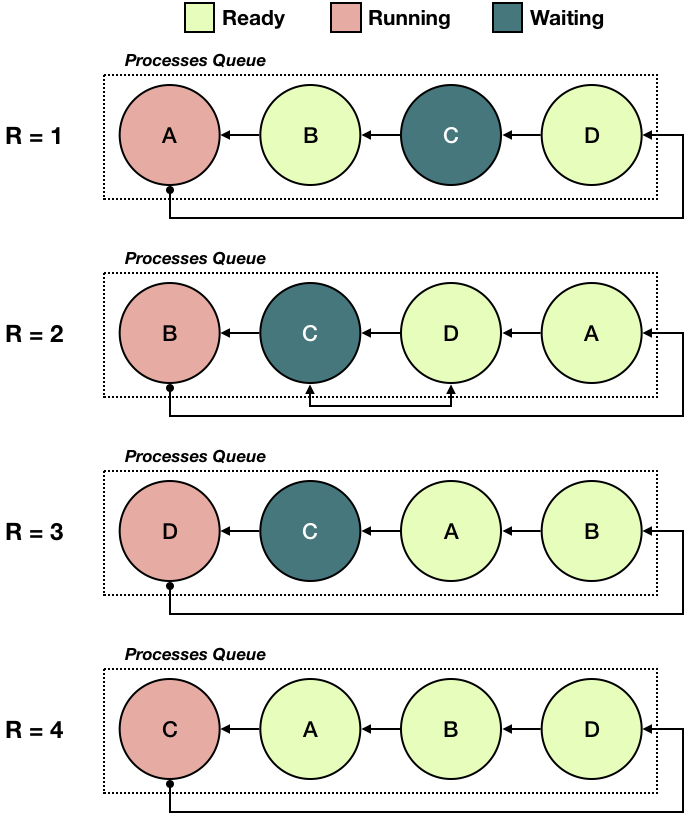
The rounds are:
In round 1, there are four tasks in the queue,
A,B,C, andD.A, the process at the head of the queue is currently running on the CPU.Cis in a waiting state, while the others are ready or running. WhenA’s quantum is used up, it is moved to the back of the queue.The task from the front of the queue,
B, is executed. It is moved to the back of the queue when its quantum expires.Since
Cis waiting for an event, the scheduler checks to see if the event being waited on has occurred. At this point it has not, soCis skipped andDis chosen to run next.Dis moved to the front and executed. At the end of the quantum,Dis moved to the back of the queue.Since
Cis still in waiting state, the scheduler checks to see if the event has occurred. At this point it has, soCis scheduled. After its time quantum,Cis moved to the back of the queue.
Would separating ready and waiting tasks be beneficial? (wait-queue)
An alternative implementation of a round-robin scheduler maintains two queues: a ready queue, consisting of only ready tasks, and a wait queue, consisting only of waiting tasks. How would you make use of the queues in the round-robin scheduler? Do you expect performance (average task latency/throughput) to be better or worse?
Code Structure¶
The Scheduler structure in kern/src/process/scheduler.rs
maintains a queue of processes to execute. Processes are added to
the queue via the the Scheduler::add() method. The method is
also responsible for assigning unique IDs to processes. IDs are
stored in the process’s TPIDR register.
When a scheduling change is required, the Scheduler::schedule_out()
and Scheduler::switch_to() method is invoked. As their name suggests,
schedule_out() method changes the current process’s state to new_state,
saves the current trap frame in the current process, and push the current
process back to the end of scheduling queue. Recalling that our Raspberry
Pi board has 4 cores, there might exist multiple process with Running state
up to the number of cores. Thus, you have to find current process based on the process id within
current trapframe.
switch_to() method finds the next process to execute, moves the next process to the front
of the queue, restores the next process’s trap frame, and marks the next process
as Running.
To determine if a process is ready to execute, the scheduler
should call the process.is_ready() method, defined in
kern/src/process/process.rs. The method returns true if
either the state is Ready or if an event being waited on has
occurred.
The scheduler should be invoked every TICK microseconds.
Timer interrupts, set up in the previous subphase, will be one of the
primary sources of a scheduling change.
The GlobalScheduler type provides thread-safe method switch() as well
as wrappers around the add() and kill() methods of Scheduler.
switch() method first gets the lock and schedules out the current process.
Then, it repeatedly tries to switch to a next process. If switch_to() method
fails to find a next process to switch to, such as when all processes are in
the Waiting state, it executes wfe instruction to enter into a low-power
state and wait until an event comes without executing further instruction.
Finally, to kill a currently running process, Scheduler::kill() method is invoked.
This method will be called by system call in the next subphase. The method
internally calls Scheduler::schedule_out() method with Dead state as a
parameter to schedule out the current process. Then, it removes the dead
process from the end of the queue and drop the dead process`s instance.
Since GlobalScheduler type provides thread-safe wrappers around the
Scheduler::kill(), it is guaranteed that the dead process is the last entry
of the processes queue.
Why doesn’t the scheduler know the new state? (new-state)
The scheduler.switch() method requires the caller to
pass in the new state of the current process. This implies
that the scheduler does not know what the new state of the
process should be. Why might it not?
Implementation¶
You’re now ready to implement the round-robin scheduler. We recommend the following approach:
Implement the
Process::is_ready()method inkernel/src/process/process.rs.The mem::replace() function will prove useful here. Please note that the
Waitingstate contains a function to check if the event being waited on has occurred. Only if it returnstrue,Waitingprocess can be scheduled.Implement the
Schedulerstruct inkern/src/process/scheduler.rs.There are five functions you need to implement;
new(),add(),schedule_out(),switch_to()andkill().Initialize the scheduler in
GlobalScheduler::initialize().The global scheduler should be created and initialized before the first process executes. The first process should be present in scheduler’s queue before it executes.
Modify the
GlobalScheduler::start().Instead of starting a process from an address of a extern function, now make use of
switch_tofunction to start a process from the scheduling queue.Invoke the scheduler when a timer interrupt occurs.
Invoke
SCHEDULER.switch()on a timer interrupt to context switch between the current process and the next process.
Test your scheduler by adding more than one process in
GlobalScheduler::initialize(). You’ll need to allocate new
processes and set up their trap frames appropriately. You’ll
likely want to create a new extern function for each new
process so that you can differentiate between them. Ensure that
you add the processes to the scheduler’s queue in the correct
order.
When you are finished, you should see a different process execute
every TICK microseconds. You should be able to interact with
each process normally between timer interrupts. When everything
works as you expect, proceed to the next subphase.
Overflow
Don’t overflow when generating a process ID!
Unsafe
You should not use unsafe to implement any of these
routines!
Hint
Use mem::replace()
to get an owned version of the process’s state.
Why is it correct to wait for events when no process is ready? (wfe)
Using the wfe instruction to wait when no process is
ready means that the CPU stalls until an event arrives.
If no event arrives after a wfe is executed,
scheduling never resumes. Why is this the correct behavior?
Hint
Think about the scenarios in which a process is in the waiting state.
Note about wfe
When there are no processes ready to be executed, the processor will go
into Wait-For-Event wfe state. Event != interrupt in this context.
Meaning that, when our processor goes into wfe, it will not be waken
up by our timer interrupt, and so the scheduling will not resume. If you
wish to have the processor waiting for interrupts instead, change wfe
instruction to wfi instruction.
Subphase E: Sleep¶
In this subphase, you will implement the sleep system call and
shell command. You will be working primarily in
kern/src/shell.rs and kern/src/traps.
System Calls¶
A system call is nothing more than a particular kind of exception.
When the svc #n instruction is executed, a synchronous
exception with syndrome Svc(n) will be generated corresponding
to system call n. This is similar to how brk #n generates
a Brk(n) exception except that the preferred link address is
the instruction after the svc instruction instead of the
instruction itself. System calls are the mechanism that user
processes use to request services from the operating system that
they would otherwise have insufficient permissions to carry out.
A typical operating system exposes 100s of system calls ranging
from file system operations to getting information about the
underlying hardware. In this subphase you will implement the
sleep system call. The sleep system call asks the
scheduler not to schedule the process for some amount of time. In
other words, it asks the operating system to put the process to
sleep.
Syscall Convention¶
Just as we need a convention for function calls, we require a convention for system calls. Our operating system will adopt a modified version of the system call convention used by other Unix-based operating systems. The rules are:
System call
nis invoked withsvc #n.Up to 7 parameters can be passed to a system call in registers
x0…x6.Up to 7 parameters can be returned from a system call in registers
x0…x6.Register
x7is used to indicate an error. Seelib/kernel_api/src/lib.rsfor possible values.If
x7is1, there was no error.If
x7is0, unknown error has occurred.If
x7is any other value, it represents an error code specific to the system call.
All other registers and program state are preserved by the kernel.
As such, to invoke an imaginary system call 7 that takes two
parameters, a u32 and a u64, and returns two values, two
u64s, we might write the following using Rust’s
inline assembly
fn syscall_7(a: u32, b: u64) -> Result<(u64, u64), Error> {
let ecode: u64;
let result_one: u64;
let result_two: u64;
unsafe {
asm!("mov w0, $3
mov x1, $4
svc 7
mov $0, x0
mov $1, x1
mov $2, x7"
: "=r"(result_one), "=r"(result_two), "=r"(ecode)
: "r"(a), "r"(b)
: "x0", "x1", "x7")
}
let e = OsError::from(ecode);
if let OsError::Ok = e {
Ok((result_one, result_two))
}
else {
Err(e)
}
}
Notice that the wrapper around the system call checks the error
value before returning the result value. You can find pre-defined system call
number and enum of OsError in lib/kernel-api/src/lib.rs.
Why do we use a separate register to pass the error value? (syscall-error)
Most Unix operating systems, including Linux, overload the
first result register (x0, in our case) as the error
value register. In these conventions, negative values with a
certain range represent error codes; all other values are
interpreted as successful return values. What is the
advantage to the approach that we have taken? What is the
disadvantage?
Sleep Syscall¶
The sleep system call will be system call number 1 in our
operating system. The call takes one parameter: a u32
corresponding to the number of milliseconds that the calling
process should be suspended for. Besides the possible error value,
it returns one parameter: a u32 corresponding to the number of
milliseconds that elapsed between the process’s initial request to
sleep and the process being woken up. Its pseudocode signature
would be:
fn sleep(t: u32) -> u32
When does the elapsed time differ from the requested time? (sleep-elapsed)
In which situations, if any, will the return value from
sleep differ from the input value? In which situations,
if any, will they be identical? What do you think the
relative probability of each case is?
Implementation¶
Implement the sleep system call now. Start by modifying your
handle_exception function in kern/src/traps.rs so
that it recognizes system call exceptions and forwards them to the
handle_syscall function in kern/src/traps/syscalls.rs.
Then implement the handle_syscall function. The function
should recognize the sleep system call and calls its handler function
sys_sleep(). Inside the sys_sleep(), modify the currently executing process
as required.
You will likely need to create a Box<FnMut> using a closure to complete your
implementation. This should look as follows:
let boxed_fnmut = Box::new(move |p| {
// use `p`
});
You can read more about closures in TRPLv2.
Finally, add a sleep <ms> command to your shell that invokes
the sleep system call, passing in ms milliseconds as the sleep
time.
Test your implementation by calling sleep in user-level
shells. Ensure that a process is not scheduled while it is
sleeping. All other processes should continue to be scheduled
correctly. Then, ensure that no process is scheduled if all
processes are sleeping. Once your implementation works as you
expect, proceed to the next subphase.
Hint
The sleep system call handler will need to interact
with the scheduler.
Hint
Recall that closures can capture values from their environment.
Hint
We are providing kernel_api::syscall::sleep(span: Duration) function.
Feel free to use it in your shell to invoke sleep systemcall.
System call number and error code can also be found in kernel_api library.
Hint
The u32 type implement
FromStr.
Phase 3: Memory Management Unit¶
In this phase, you’ll enable the support of the memory management unit so that
our system can run multiple processes independently with each running in their own private
virtual memory space. You’ll start by reviewing VirtualAddr and
PhysicalAddr structs and several traits to support translation between
addresses.
Then, you’ll implement a two level page table indexing 64KB aligned page. With this
PageTable struct, you’ll implement kernel page table and user page table.
Finally, you’ll revisit code you have partially built in the previous phases, such as init.rs
or scheduler.rs, in order to support context switch between processes having
virtual memory space.
Subphase A: Virtual Memory¶
In this subphase, you’ll review VirtualAddr and PhysicalAddr
structs to represent 64bit address values under kern/src/vm/address.rs. Then,
you’ll add two more registers in your TrapFrame under kern/src/traps/frame.rs
and kern/src/init/vectors.s
Why Do We Need Virtual Memory?¶
Instead of sharing physical memory between kernel and user processes, each user process will have its own virtual memory space. This will isolate processes from each other and protect the kernel’s memory from untrusted processes.
By supporting virtual memory space, user processes do not need any knowledge of the physical memory space anymore. That is, processes will be unaware of the actual hardware addresses, or about other processes’ virtual spaces that might execute at the same time.
Because of the isolation between virtual spaces of each process, two different processes might use the exact same virtual address, but each will translate into two different physical addresses.
Also, because of the isolation between virtual and physical space, we can translate contiguous virtual memory pages into fragmented physical memory pages. Hence, we can utilize fragmented pages in the physical space to form one contiguous virtual space. User processes can write, compile, and link applications to run in the virtual memory space, and the operating system will take care of mapping all memory accesses to the physical memory addresses.
For the operating system to achieve this, it needs the memory management unit, commonly referred to as MMU, that handle all translations between virtual spaces and physical space.
How To Work With The MMU?¶
The memory management unit is a hardware unit that makes the translation between virtual space addresses and physical addresses. To make use of it, we need to enable it first, and provide the page mapping table which it will use for translations. That is, the MMU will perform all the translations, but the operating system is responsible for creating and upkeeping of the page tables.
With the MMU enabled, all processor instruction fetch or memory access will go through the MMU for translation, and so we will need to provide it with the proper page tables for both the kernel and user space.
A consequence of turning on the MMU is that the kernel now have to be prepared to use the virtual memory and maintain its own set of page tables. We will see how to set that up in later parts of this phase.
Separation of Kernel And User Process¶
Operating systems typically have a number of processes that are running concurrently. Since each of those processes have its own virtual memory space, the operating system needs to keep track of each process translation table. The translation table of each process will contain information that maps each virtual page address into a physical page address. Since these page tables are used for translation between user processes and physical addresses, they are hence called User Page Tables.
In the same way, since now we are enabling the MMU, we need to provide a Kernel Page Table that the MMU will use to continue to map the kernel addresses correctly. The MMU will also enforce the permissions of the kernel pages stated by the kernel page table we provide. Hence, we will have a permission isolation between kernel memory pages and processes memory pages.
Our ARM architecture have two registers to keep track of the page table the
MMU should use for address translations: Translation Table Base Register
TTBR0_EL1 and TTBR1_EL1. In our design, we will use TTBR1_EL1 to
point to the User Page Table base address, and TTBR0_EL1 to point to the
Kernel Page Table base address. We will need to add both registers to the
TrapFrame for bookkeeping of each process and the kernel page tables.
Since now we have the kernel and user level using the virtual space address,
we will need to split the virtual address space, so that we have a clear
address isolation between kernel and user addresses in the virtual space. To do
so, will use addresses starting from 0xffff_ffff_c000_0000 for user level
virtual address, and addresses starting from 0x0 for kernel space
virtual address.
Thus, the maximum size of the virtual memory space for user level would be
0x4000_0000, which is 1GB memory. You can find these variables defined in
kern/src/param.rs.
How does the MMU know which table to use? (which-table)
Given a virtual address, the MMU will use either the user page table based
at TTBR1_EL1, or the kernel page table based at TTBR0_EL1 in order
to correctly translate to the physical address. But how does the MMU know
which of the two tables to use for a given address?
Hint
We did not split the kernel and user level virtual space at arbitrary address! What happens if we make the kernel level at the upper virtual space part? The following reference might help: ARMv8-A Address Translation
Implementation¶
Review the VirtualAddr and PhysicalAddr in kern/src/vm/address.rs.
Although they have different name and different purpose, there is no difference
in their structure, required traits or functions.
Now add TTBR0 and TTBR1 registers to the trap frame. You need to modify
kern/src/traps/frame.rs and kern/src/init/vectors.s to do so. You should
add instructions to save and restore TTBR0 and TTBR1, just like we
did with other system registers: saved in context_save before calling
handle_exception and restored in context_restore after returning back.
Also, you should add TTBR0 and TTBR1 in TrapFrame structs
accordingly. Note that your TrapFrame struct should exactly match the trap
frame’s layout.
In addition, insert the following four lines after restoring TTBR0 and
TTBR1 from the stack in vectors.s. This code block is required to ensure
that memory accesses that occur before the dsb have completed before the
completion of the dsb instruction.
dsb ishst
tlbi vmalle1
dsb ish
isb
Test that your modification doesn’t affect your trap frame and context switch functionality. If everything still works well, you can proceed to the next subphase.
Subphase B: Page Table¶
When the processor issues a 64-bit virtual address for an instruction fetch, or data access, the memory management unit(MMU) translates the virtual address to the corresponding physical address.
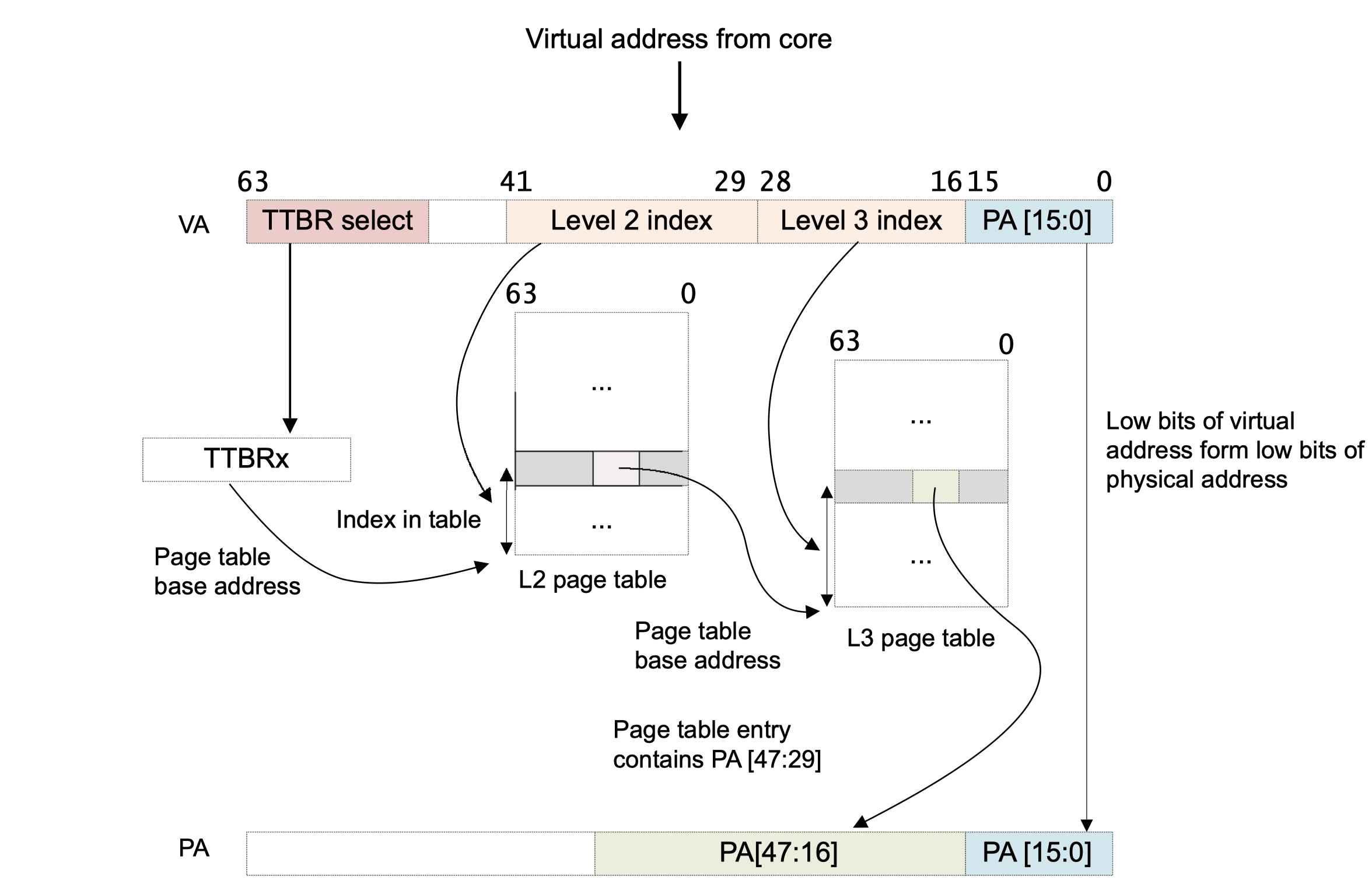
The above diagram depicts an example of virtual to physical address translation for a 64KB page. This assumes a 64KB granule and 42-bit virtual address space and we are going to stick to this setting. You could find more detail diagram with bits specified in Figure K6-13 in (ref: K6.1.2).
Lets walk through what is happening in the diagram above. The 64-bit virtual address -shown on the top- is split into 4 regions:
Bits [63-42] are used to decide which page table to use, the one based at
TTBR0orTTBR1, this is the first step of translation.Bits [41-29] are used to index into the L2 table based at the chosen
TTBRx. Since 13 bits are used, this level of the page table can have 8192 entries, with each having 64-bit. We will later discover how each bit of the 64-bits is used, for now, we will just state that bits [47-16] of these entries are used to provide the base of the L3 page table.Bits [28-16] are used to index into the chosen L3 page table. Since we are using 13 bits, we can have 8192 entries for each L3 page table, with each entry being 64-bits. Out of these 64-bits, we will use the bits [47-16] in the final physical address.
Bits [15-0] are used as a byte offset within the page addressed by bits [47-16] from L3 entry. Since we are having 64KB pages, 16 bits is enough to address each byte within.
Having known the different parts of the virtual address, lets detail the steps taken by the MMU to perform the address translation:
If it is a user page mapping,
TTBR1is used for the base address for the first page table. When it is a mapping for kernel or I/O peripherals,TTBR0is used for the base address for the first page table.The page table contains 8192 64-bit page table entries, and [41:29] bits of virtual address are used as an index to find an entry in the table.
Check the validity of the L2 page table entry and whether or not the requested memory access is allowed.
If the entry is valid and allowed, the [47:16] bits of L2 page table entry is used to find the address of the level 3 page table.
Bits [28:16] of the virtual address are used to index the level 3 page table entry.
Check the validity of the L3 page table entry and whether or not the requested memory access is allowed.
If the entry is valid and allowed, the L3 page table entry refers to a 64KB physical page. Bits [47:16] are taken from the level 3 page table entry and used to form bits [47:16] of a physical address.
Because we have 64KB page, virtual address [15:0] is taken to form physical address [15:0].
The number of page tables within each level is up to the operating system, and how much memory it needs to map. The fact is, if we fully utilize this hierarchical model, we will end up with much bigger virtual space than our need. In our design, however, we are sufficed with only 1GB of virtual memory in the user level. Hence, for the user page table, we will have only one L2 page table, with two entries, each pointing to different L3 page table. Each L3 table of the two will have 8192 entries, each pointing to a 64KB page. So the calculation becomes:
1 (L2 table) * 2 (L3 tables) * 8192 (L3 entries) * 64KB (page size) = 1GB
How is our design different? (translation-control)
The figure you see above does not exactly match our design. Particularly,
the number of bits of TTBR select and Level 2 index are not the
same in our design. Can you figure out the number of bits we allocated for
each? and how exactly did we configure the MMU to apply our design?
Hint
Exactly the same hint of the previous question: how did we enforce the
address split between the kernel and the user virtual spaces? Where in
our code did we configure the MMU such that addresses above
0xffff_ffff_c000_0000 are for user virtual space?
Page Table Entry¶
The Page table entry PDF contains the specific details about L2 and L3 page table entry including their bit locations, names, and field descriptions. You will be referring to this document when you implement your page table. For more details, see the (ref: D4.3)
ADDR field contains 32-bit output address. That address is used differently
depending on if it is a L2 table entry or a L3 table entry. For L2 table, the output address
will be combined with Level 3 index that is located in [28:16] bits of virtual address
to point the L3 page table. For L3 table, the output
address will be the [47:16] bits of the translated physical address.
The low 10 bits of each entry represent the memory attributes.
VALID : Identifies whether the descriptor is valid. You should set the entry as valid to use it.
TYPE : L2 entry can be interpreted as a descriptor pointing a block of memory or a descriptor pointing next level of translation table (L3). Note that our L2 entries needs to point the L3 table, while our L3 entries will point to the memory pages.
ATTR : Describes memory region attributes. When user page table allocates a new page, its L3 entry should be normal memory. Likewise, when kernel page table sets L3 entries, they should be normal memory. On the other hand, for the memory range from
IO_BASEtoIO_BASE_END, they should have device-memory entries in L3 page table.NS : We don’t consider this for our system
AP : Sets data access permission of the entry. The kernel page table should have
KERN_RWpermission while the user page table should haveUSER_RWpermission.SH : Shareability field. Normal memory space should set their entries as inner shareable while device memory should set theirs as outer shareable.
AF : Should be set when first accessed. Make sure you set this bit whenever you make a page table entry; in our implementation, we will assume all pages are being used.
Now open the lib/aarch64/src/vmsa.rs file and review the pre-defined attributes,
RawL2Entry bits and RawL3Entry bits. You can find defbit! macro
defined in lib/aarch64/src/macros.rs file. Match your understanding with the
library codes and learn how to use methods implemented for each entry.
Our OS Memory Space Layout¶
Now that you have knowledge about the small details of the MMU and the page tables. It is time to discuss how we are designing our operating system memory layout.
As a quick recap, in the virtual space, the kernel addresses will start from
virtual address 0x0, while the user addresses will start from virtual address
0xffff_ffff_c000_0000. This is how we divided the virtual space, but what
about the physical space?
We will design our operating system as follows: Once our kernel start running,
we will create the kernel page table, and map all available physical memory to
the kernel virtual memory. That is, we will use our memory_map function,
that we implemented in Lab 3, to give us the end of the available physical memory.
Then, we will start at address 0x0 in both address spaces, virtual and physical,
and insert a page table entry for every page until the end limit we got from
memory_map. This way, the kernel can continue to use the physical addresses
we have been using without change, and we made the MMU happy by providing the
table it needs!
We will also do the same for memory mapped IO devices. We will map the region
between IO_BASE and IO_BASE_END to the same respective virtual address
for every page. That way, we can continue to use the IO devices with the same
addresses we have. You may find the definition of IO_BASE and IO_BASE_END
in pi/src/common.rs.
Note that since our rpi memory is 1GB, we can design the kernel page table exactly as we did in the user page table: One L2 table and two L3 tables.
But what about the user virtual memory? If we map all physical memory to the kernel virtual memory then what will we map to the user virtual space?
Actually, mapping the pages to the kernel virtual memory does NOT mean they are allocated! We are only creating this mapping so that the kernel can manage the physical memory using the virtual space.
So now, how does the memory allocation look like? If you remember, our allocator
is managing the memory given back by memory_map, which uses a physical address.
In case the kernel needs to allocate memory, we can continue to use the allocator as usual, since the physical address space the allocator uses and the kernel’s virtual space are identical; thanks to the kernel page table we built in the beginning.
In case the user needs to allocate memory, we will use our allocator too, but then we will need to insert a proper page table entry in that context’s user page table, so that the translation happen properly.
With this design, the allocator ensures that the kernel and the user have their demand of memory, without the kernel accidentally using a page that is allocated to the user. The MMU ensures that the user does not have access to the kernel pages since we are flagging the kernel permission for kernel pages, and we do not need to change any of the physical addresses we have been using in the kernel since the virtual address for the kernel is no different, pretty cool!
Implementation¶
You’re now ready to implement a two level page table with 64KB granule starting
at level 2. You’ll be primarily working in kern/src/vm/pagetable.rs ,
kern/src/process.rs and kern/src/vm.rs.
We recommend the following approach:
Implement
L2PageTable,L3EntryandL3PageTablestruct.Feel free to add useful traits to convert {usize, u64, i32,.. } types to
PhysicalAddrandVirtualAddr, or some functions to convertPhysicalAddrandVirtualAddrto {usize, u64, *mut u8,…} such asas_usize(),as_u64(), andas_mut_ptr().Implement
PageTablestruct.There are six methods needs to be implemented for
PageTable. The requirements for each methods are specified in doc-comments within a skeleton code. Note that we are supporting virtual memory space up to 1GB memory. Thus, two L3 page table is enough to cover the space and L2 page table should have entries no more than 2. Whenever you make a page table entry, please make sure you set the proper bits value.Implement
IntoIteratorfor&PageTable.The returned iterator should iterates from the first entry of the first L3 page table and moves on to the second L3 page table.
Hint
The chain() method will be useful.
Implement
KernPageTable::new()method.KernPageTableis a struct that internally has smart pointer ofPageTable. First, create aPageTablewith proper permission for the kernel page table.Then, load all the memory space residing in SDRAM starting from 0x0000_0000. You can get ending address by calling
allocator::memory_map()function implemented in the lab3. Note that this space is normal memory that is internally shared. Set proper settings for L3 entries and set those entries in the page table.Then, set L3 entries for I/O memory range from
IO_BASEtoIO_BASE_ENDas device memory. The range variables are defined inpi/src/common.rs. The entries should have same settings with the one for normal memory space, except that its attribute should be set as device memory and it is outer sharable. Also, make sure to set the proper bits value for each page table entry you create.Note that we are using 64KB page granularity for both cases.
Implement
UserPageTablestruct.For the user page table, you don’t need to set any pages into the pagetable in creation time.
When
alloc()function is called, allocates a 64KB page, creates an L3 entry with proper settings, set the physical address of the allocated page to L3 entry’sADDRfield, and set the entry in the page table. Before looking up the page table with virtual address, note that the virtual address for user process starts fromUSER_IMG_BASE, which is0xffff_ffff_c000_0000. You have to subtract this base address from the virtual address to lookup the page table and set entries. Make sure to set the proper bits value for each page table entry you create.Implement
Droptraits forUserPageTable.To implement
Droptraits, iterate the internal pagetable anddealloc()each entry that exists.Let a
processstruct have aUserPageTable.You can simple do this by uncommenting
pub vmap: Box<UserPageTable>,line within theProcessstruct inprocess.rs. ModifyProcess::new()method to return theProcessstruct holdingvmap.Finally, implement
VMManagerinkern/src/vm.rs.The virtual memory manager is a thread-safe wrapper around a kernel page table. Before its first use, it must be initialized by calling
initialize()which internally callssetup()method. Setting up the virtual machine manager includes configuring some proper values to the several relevant registers.Here is the registers used by the
setup()method :ID_AA64MMFR0_EL1: AArch64 Memory Model Feature Register 0 (ref: D7.2.43)Tgran64field is used to check whether the current system support 64KB memory translation granule size or not.startup()panics if it’s not supported.PARangefield is used to check the range supported for physical address.MAIR_EL1: Memory Attribute Indirection Register (EL1) (ref: D7.2.70)Provides the memory attribute encoding corresponding to the possible AttrIndx.
TCR_EL1: Translation Control Register (ref: D7.2.91)It controls other memory management features at EL1 and EL0. (guide: 12.2)
TTBR0_EL1andTTBR1_EL1Specifies the base address of the translation table.
SCTLR_EL1: System Control Register (ref: D7.2.88)Provides top level control of the system including memory system.
Now complete the implementation for
VMManagerby writing codes for unimplemented methods.
Hint
Instead of using raw bit and bit operation, use wrapper functions and
variables from aarch64 library to prevent potential typos and mistakes.
Hint
We also have interface for registers in aarch64 library.
Why do we need Deref and DerefMut traits? (Deref)
In pagetable.rs, we have Deref and DerefMut traits for
KernPageTable and UserPageTable. What are the roles of these
traits and why do we need them?
We do not support page access rights permissions
Even though in the implementation of UserPageTable::alloc you might see
_perm for memory page access rights permission (i.e. RW pages or RWX),
we do not actually use it. It is there just as a stub for future support
of this feature. Note, however, that we do support MMU page permissions
isolating the kernel and user space pages. We do this by setting the
proper values in the page table entries, AP.
Testing Virtual Memory¶
First, we’ll add one line of code in kern/src/main.rs.
Call initialize() method for VMM before calling scheduler
initialization. Thus, your kmain() will now have six lines like below:
unsafe fn kmain() -> ! {
ALLOCATOR.initialize();
FILESYSTEM.initialize();
IRQ.initialize();
VMM.initialize();
SCHEDULER.initialize();
SCHEDULER.start();
}
As your kernel now enables virtual memory, your process should have a user page table. We’re going to implement several user programs as well as loading those programs as a process in the next phase. Before moving to the next phase, let’s simply test whether your user process can be run with user page table.
In initialize() function in kern/src/process/scheduler.rs. We can start
using the virtual address instead of the physical address.
Since we do not have any process in the virtual space, yet. We have provided
a test function test_phase_3. This function, given a process, will
allocate a new page at address USER_IMG_BASE in the process’s virtual space, and will
copy the function test_user_process to that page. So that now if we set
elr to USER_IMG_BASE, it should run test_user_process.
Set ttbr0 and ttbr1 appropriately for each process.
ttbr0 should have the base address of the kernel page table while
ttbr1 should have the base address for the user page table.
Then, call test_phase_3() function for each process, so that they have
something to execute at USER_IMG_BASE, and set elr to USER_IMG_BASE.
test_user_process is a simple function that invokes a sleep system call.
Finally, add the processes to the scheduler queue.
If everything works well, you can see your each process sleeps for 10 seconds
falling to the Waiting status right after it is scheduled. You may want to
print timer interrupts and scheduling queue to check it.
Phase 4: Programs In The Disk¶
In this phase, you will further modify Process structure implementation to
load programs binaries from the filesystem image to create
a process.
Subphase A: Load A Program¶
In the previous phase, we generated user-level processes using extern
function and started them by passing the address of the extern function to
the ELR register of trap frame. However, implementing all the user programs in
the kernel code is not practical nor safe. Instead, we’ll implement features to load
programs written by the user outside of the kernel, compiled and
stored in the disk as binary.
In this subphase, you will be working in kern/src/process/process.rs.
To convert a program binary from the disk to a Process struct, you need
the following steps:
Open the binary file, and create a process object.
Allocate a 64KB page within the process’s user page table for user process’s stack. This page should have read and write permission.
Allocate a 64KB page within the process’s user page table with virtual address starting from
USER_IMG_BASE. This page should have read, write and execute permissions. Start reading the binary file and store it in the allocated page. Keep allocating additional pages until you are done reading the whole binary file.Set the trap frame for the process with the proper values.
Implementation¶
First, complete the helper functions.
There are four functions returning VirtualAddr in
kern/src/process/process.rs.
You can find relevant constant variables defined in kern/src/param.rs
get_max_va(): Returns the highest virtual address for user process.get_image_base(): Returns the base address for the user virtual memory space.get_stack_base(): Returns the base address for the user process’s stack in the virtual space. Since stacks grow from higher memory address to lower memory addresses, a good stack base would be the last page in the user’s virtual space. Note that the address should be aligned by PAGE_SIZE.get_stack_top(): Returns the top of the user process’s stack. This will be set to the stack pointer once the process is run. It should be the maximum stack pointer possible. Remember, in ARM, stack pointers are 16 byte aligned.
Then, complete load() and do_load() methods.
do_load() method gets a
path to the file as a parameter and returns a wrapped Process struct.
do_load needs to create a new process struct, allocate the stack in
process virtual space, opens a file at the given path and read its content into
the process virtual space starting at address USER_IMG_BASE.
load() method internally call do_load() method. Then, it should sets
the trap frame for the process with the proper virtual addresses in order to
make the process run with user page table. Finally, it returns the process
object ready to be run.
Compiling User Programs¶
Now that your operating systems support loading and running user programs for the file system, we should give it a run. But first, we need to compile the user programs to our OS needs.
In commodity OSes, like Linux, executables are usually compiled into an
executable file format such as elf. The process of loading user programs
into memory and getting them to run is usually more complicated than what we do
in our operating system. You may read about how it is done in the Linux kernel
How programs get run: ELF binaries.
For our operating system, however, we do not have an elf interpreter, and so
we will need to compile our programs into a plain binary file that expect to be
loaded at address USER_IMG_BASE.
We have provided two user programs ready for you to compile at user directory.
fib actually needs the system call write which we have not implemented
yet. So, we will base our example on sleep, which have the same behavior as
the test_user_process function you have seen before.
To compile sleep, run make at user/sleep. This will generate two
files at user/sleep/build: sleep.bin and sleep.elf.
sleep.elf is the elf version of the sleep program. Since we do not have
an elf interpreter, we cannot use it in our operating system. Instead, we
will use sleep.bin, which is literally just a stream of the executable bytes.
Once you have compiled sleep, copy sleep.bin into the SD card, and move
on to the testing phase.
Test your implementation¶
We provides two user programs fib and sleep under user directory.
As the name suggests, sleep is a program that calls the sleep system call.
It has the exact same codes as the previous test_user_process() function.
The behaviour of fib is also very simple. It just calculates 40th fibonacci
number with recursive fib() function. You can find the source code in
user/fib/src/main.rs.
Then, revisit the kern/src/process/scheduler.rs.
Now, we don’t have to manually set the registers and add the processes
created from an extern function, but we can load multiple programs
from our disk using Process::load function.
Load four sleep programs and add them in the scheduling queue in
initialize() method.
Finally, modify inline assembly in GlobalScheduler::start() function. Instead of the address
of _start function, calculate the address of the next page and store it to
the sp register. This way, we will have a clean page for the stack when
we return to the kernel level. Before calling eret, don’t forget to clean any
register that may leak information or addresses from the kernel.
After boot up, if the four sleep programs starts, you can continue to the next
subphase. Note that you can’t test fib program yet because we haven’t
implemented write system call. We will implement it and some more system
calls in the next subphase.
If you wish to use qemu, and need a file system image that have the user
programs inside of it, you can use user/build.sh script. This
script will generates fs.img that contains compiled binary of sleep and
fib program.
Subphase B: User Processes¶
In this subphase, we will extend our system call library to make it more useful
to user programs. We will also write and compile an example user program in Rust,
which should be run on top of our operating system. Finally, we will apply
changes in our system call handler to add the new system calls.
You will be working primarily in lib/kernel_api/src/syscall.rs and
kern/src/traps/syscall.rs.
User Programs¶
First, we will build the kernel api library for our operating system. This library will be imported by user level programs to initiate a system call to our operating system.
Start by implementing functions in lib/kernel_api/src/syscall.rs. Each function
should be implemented to invoke system call corresponding to the name of the
function.
To give you an example, lets walk through how does system call are handled in
our system. The user program import the library kernel_api, and use its
functions. The functions in kernel_api will implement the required assembly
to issue the system call to the operating system, with the appropriate system
call number and arguments. This will trap into the operating system
handle_exception, which will forward the request to handle_syscall.
Similarly, handle_syscall will categorize the request based on the syscall
number, and forward it to the responsible handler. The handler will execute
the required functionality of the system call, and return back through the
chain of calls to the user level.
Start implementing the library functions at lib/kernel_api/src/syscall.rs.
All you have to do in these function is to prepare the argument for the
required system call, and issue the svc instruction. We have provided
sleep as an example. The system call numbers are defined in
lib/kernel_api/src/lib.rs. Please refer to lib/kernel_api/src/lib.rs to
find pre-defined variables for system call number.
Then, for each system call you implemented, make sure you complete the full chain of
handling it just as we described above, i.e. add it to handle_syscall and
write the respective sys_{SYSCALL} function in kern/src/traps/syscall.rs.
We recommend you to start from implementing write system call. When you are done
implementing it, you can now run multiple fib programs with the same way you
did for the sleep program.
If all is well, you can see fib processes running and their output is
printed.
Note that you have to recompile the user programs whenever you are making
changes to kernel_api.
When you are done with implementing every functions in the kernel_api
user library as well as its system call handler in the kernel, try to call and
test every system call in the fib program. Also, if you feel adventurous,
write your own programs. You can copy the same build system from fib and
use it in your program to generate a working binary.
Check your code before submit!
Before submitting your code, please change your TICK variable in
kern/src/param.rs to 10 ms. In addition, please check you are not
leaving any system calls nor exceptions you used for debugging.
Your main should have all 6 lines:
5 initialize() calls and 1 start() call.
Submission¶
Once you’ve completed the tasks above, you’re done and ready to submit! Congratulations!
You can call make check in tut/4-spawn directory to check
if you’ve answered every question.
Once you’ve completed the tasks above, you’re done and ready to submit! Ensure you’ve committed your changes. Any uncommitted changes will not be visible to us, thus unconsidered for grading.
When you’re ready, push a commit to your GitHub repository with a tag named lab4-done.
# submit lab4
$ git tag lab4-done
$ git push --tags